
Peter wrote:
Congratulations on a good reply from Straubing!
All the merit goes for them :-)
I will keep the post updated with the results…
I performed the ACC calibration as advised by Straubing.
The short flight I performed after was limited due to rain, so little possibility to properly check the AP during a steady climb, as was staying near the circuit pattern, inside the CTR.
I however managed to get a little video of a right climbing turn. I think it has improved over previous behavior. You’ll tell me what you think of it.
What seemed important to me is that there wasn’t dangerous pitch excursion.
Wind was calm, light turbulences and rain were the actual conditions. Probably a updraughts during the climb to. The weight and balance was very different from previously, as I didn’t have the two bikes (25kg+) in the bagage area.
That variation in the VS doesn’t look right to me. There is an oscillatory element there. Has this been seen before?
I really need to give more trials in different conditions / altitudes so that we exclude “chance”. Can’t say it has never been rock solid in climb (VS) and turn, but that doesn’t mean it is normal that it has always been the case :-)
Differently, maintening altitude and descending along an ILS is very accurate.
@Peter
If we consider again Straubing’s strategy, would you think the problem to be on the computer side, or the pitch trim servo side ?
I doubt it is the pitch servo, if the autopilot is working OK otherwise e.g. holding the correct VS when climbing straight ahead.
It would do no harm to visually check the bridle cables (the steel cable which wraps around the servo capstan and moves the control surfaces) and perhaps check their tension is to spec.
After that, I don’t know.
Thanks Peter.
As for bridle cables tension, I wonder why it would allow nice straight climb and good altitude hold, if something was wrong here.
Will need to check as well obviously…
In that case I agree it won’t likely be the servos.
Has it always behaved like this?
What is the ball doing? One possibility is that, especially in a non coordinated turn, something goes wrong with the static air system and the autopilot is seeing the wrong altitude and thus derives the wrong VS from it.
The ball is…. hey showing I kept applying right rudder while the plane had leveled… I am not a champion here :-)
The question of static, I am not sure.
Does the KAP140 use its proper static source, or the static source line of the aircraft ??? In that case, it could explain some thing….
As well, I could try the alternate static to see how it goes
PetitCessnaVoyageur wrote:
Does the KAP140 use its proper static source, or the static source line of the aircraft ??? In that case, it could explain some thing….
On the 172 it uses its own static port. But surely that information is in the POH for your aircraft!?
I thought it was using its own.
Straubing made it confused to me.
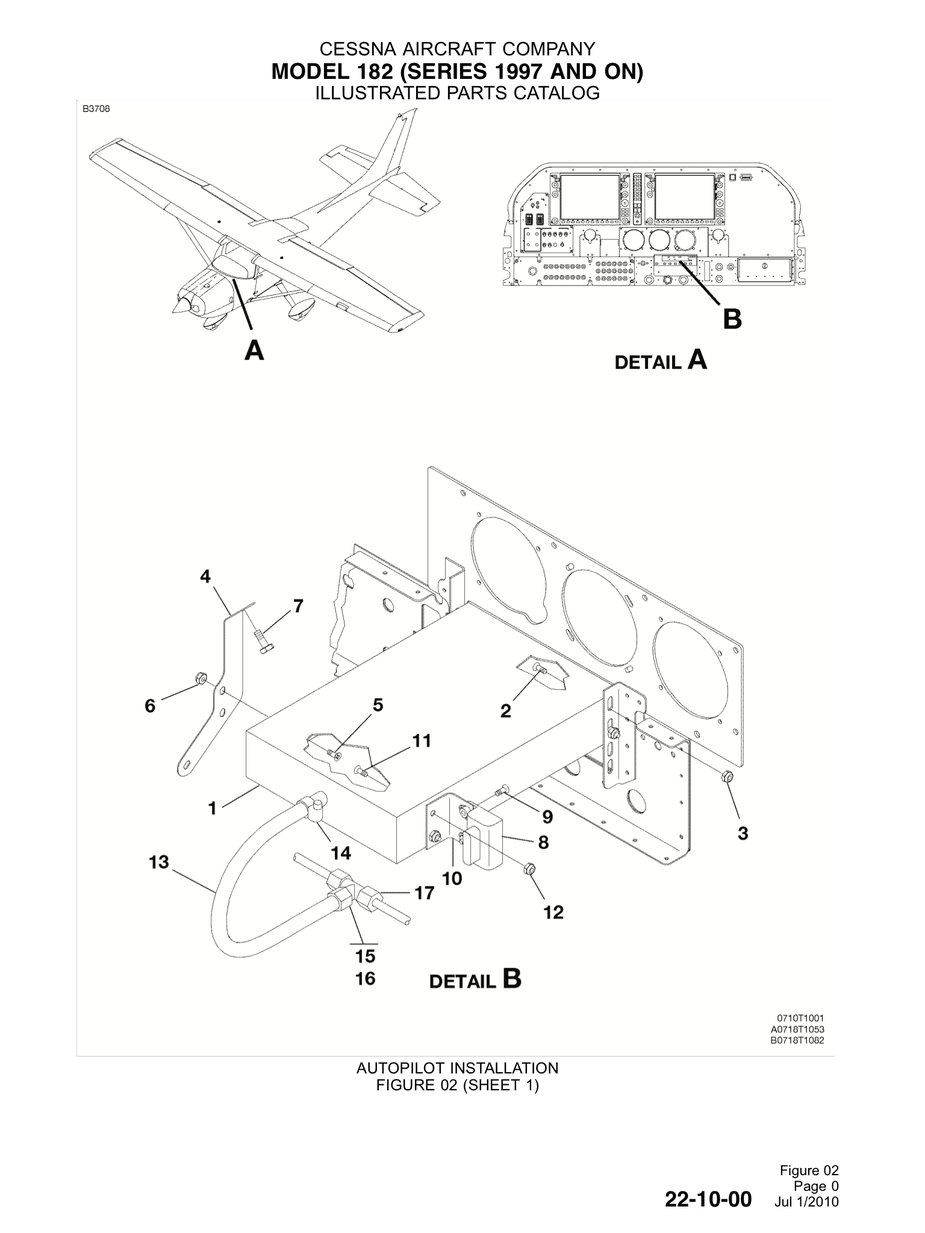
And the IPC too (above), where it seems to connect to the static line.
Will check the POH.
Nice to see how technical data meets exploitation considerations :-)


