denopa wrote:
@MalibuFlyer on the MD302, do you have the magnetometer? I have it and I had huge drift issues; we’ve disconnected it and it’s now rock solid.
I have and will try disconnecting
alioth wrote:
ball centred and no heading change – you must be flying straight with wings level.
ball off to the left and no heading change – you must be uncoordinated with too much right rudder.
ball off to the right and no heading change – you must be uncoordinated with too much left rudder.
This isn’t always strictly true, if drag and thrust dont exactly act through the centreline. This too would need to be considered.
@Malibuflyer I am just now reconnecting it with an updated software. I should know if it works in about 2-3 weeks and will let you know.
Given we did our panels at the same shop and they definitely know about my issues I’m surprised they haven’t connected the dots and told you about this.
alioth wrote:
even with the air data and GPS failed
You don’t need air data, and certainly not GPS. In the MGL documents the air data is mentioned. The way they do it is simply to assume or “fake” air data, lets say 100 knots. This will never be correct, unless you are flying at 100 knots, but good enough for the Kalman filter to work properly.
denopa wrote:
Given we did our panels at the same shop and they definitely know about my issues I’m surprised they haven’t connected the dots and told you about this.
I had my device exchanged and it works quite well now (perhaps it already has the new Software). I would not consider a slight tilt after a very long descent an issue for a standby instrument.
Another question. Is an old fashioned certified mechanical AI good enough (legally) as a primary instrument for IFR? And would anyone use such a thing today?
In that context it doesn’t really make much sense that an electronic AI “must” have GPS signal (if only for practical purposes) while a mechanical AI does not. Isn’t it correct that if you fly at constant alt and speed, and the ball centered and you fly at a constant magnetic heading, then you have to fly straight and level (at a constant speed)? Any AI, mechanical or electronic, will erect itself in such a situation, and therefore they will work just fine. But it’s also true that a GPS can be used as a rudimentary “AI”. All Garmin GPS’es have this functionality AFAIK.
LeSving wrote:
Another question. Is an old fashioned certified mechanical AI good enough (legally) as a primary instrument for IFR? And would anyone use such a thing today?
Yes and yes. I would expect that most light aircraft used for IFR today still have mechanical AIs.
This is also relevant.
A mechanical AI’s erection mechanism cannot detect the very small change in the Z axis G between a coordinated Rate 1 turn, and the straight parts of a holding pattern. An electronic AI could detect this, in theory, by looking for the minimum sustained Z axis G value, together with zero X and Y axis values.
LeSving wrote:
Is an old fashioned certified mechanical AI good enough (legally) as a primary instrument for IFR? And would anyone use such a thing today?
To have a totally separate source of attitude information, including where it is powered from. Many light GA IFR planes do not have a dual alternator electrical setup and keeping vacuum is one way to provide more redundancy.
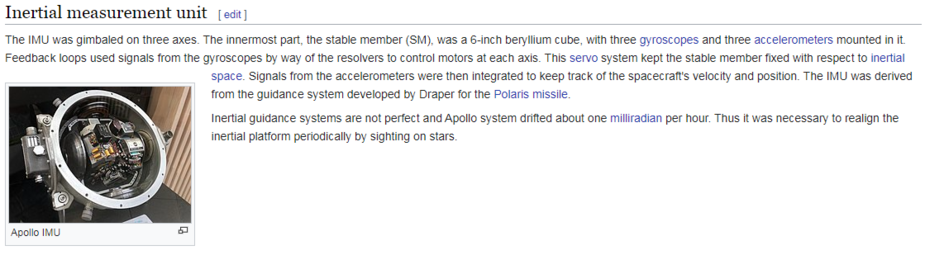
It turns out that the way this is done has been the same since for ever.
3 rate gyros, 3 accelerometers.