
PetitCessnaVoyageur wrote:
Didn’t Peter suggest it was not possible to have both ?
Well… he did but I’m not sure he’s right this time. At least for DA42 upgrades that I’ve read about.
Didn’t Peter suggest it was not possible to have both ?
I posted what I know above. A part of it came from an ex HBK autopilot specialist. It is about all I know 
There are avionics people here who know more because they do it in their day job, or used to, but they are mostly on strike, presumably due to “solidarity” with certain installer(s) who got “blown” on EuroGA Well, one can’t have it all, and keep everybody happy at the same time.
Emir wrote:
Well… he did but I’m not sure he’s right this time. At least for DA42 upgrades that I’ve read about.
That’s interesting, because Peter has got first hand informations on the topic.
It would be really great to have Diamond engineer input on how they proceed.
I have not yet had to visit this issue but will have to do so when I install LPV capability. Then the KFC225 will need to be fooled into believing it is flying an ILS when it is flying an LPV. I think it will be solved by permanently wiring the KFC225’s ILS_ENERGISE input into a live state, but that may make it overly sensitive in lateral guidance during enroute flight. Another way, if a WAAS GPS has an “LPV ACTIVE” output, one could use such a signal. I will have to read through my many emails with Sandel from a few years ago on this very topic. The STCs prohibit do not authorise any “interesting/neat” solutions and you will find past posts here by @nc_yankee describing an “approved” solution involving pressing buttons twice; that is for the KFC225 and I am not sure if it is the same for other King autopilots. Diamond could have obtained an STC to solve this… in the same way that Sandel got an STC for the SN3500 which does this (partly or wholly; I don’t remember).
The KAP140 and KFC225 autopilots were amongst the last to be approved to work with the GNS430W/530W because of the way they work when the navigation source is changed from GPS to VLOC and visa versa. When this source change is detected, these autopilots revert to roll mode, IOW they disconnect from the Nav source and need to be re-engaged to connect to the changed Nav source. In most cases, this does not present an issue, but these autopilots were not designed to do vertical with GPS as the Nav source, as they predated the introduction of the capability. They were designed to do vertical when flying an ILS, but the Nav source is VLOC. To get these autopilots to fly an LPV, the electrical analog signals of an ILS are simulated, as they are the same anyway, with the exception of the Nav source which is GPS. Also, with the GNS WAAS series, there are two signals for approach, one is labeled “ILS Energize” and the other is labeled “ILS/GPS approach”. The ILS Energize is one of the analog inputs for the autopilot used as part of the interface to indicate that an ILS frequency is channeled by the Nav system and that a GS is possible. In a GNS installation, the correct output of “ILS/GPS Approach” is wired to the autopilot “ILS Energize” input so that either an actual ILS or an LPV can generate this signal. As an aside, there are many avionics shops that don’t bother to read the interconnect and hook up the “ILS Energize” output from the GNS530W to the “ILS Energize” input of the autopilot and the result is that the autopilot will only intercept and track a GS on an ILS, but not on an LPV.
However, the issue is that when flying a GPS approach, GPS is the Nav source, but to track the LPV GP, the signals from the navigator must switch to emulate an ILS which requires that the NAV source to be faked to VLOC. The problem is that when this happens, if the pilot had already selected approach mode when GPS was still the Nav source, the switch to VLOC to emulate an ILS causes the autopilot to disengage the approach mode and revert to roll mode. This characteristic was not deemed to be acceptable by the FAA and they would not certify the combination of the KFC225/KAP140 with the WAAS GPS. Garmin’s solution that was accepted by the FAA is called “Prompt mode” and is a configuration setting in the WAAS Navigator. When a vertically guided GPS approach is loaded, it is flown using GPS as the Nav source until the point in the approach when all the conditions are met for intercepting the GP. At that point, a message is generated on the WAAS navigator, which tells the pilot to:
APR Guidance Available – Use PROC before A/P APR
— For units configured with the KAP140 or KFC225 autopilot, this message reminds pilots, when they turn on course to the FAF, that they need to enable autopilot outputs (by pressing PROC and selecting “Enable A/P APR Outputs?”) before switching the autopilot control panel to APR.
So the pilot receives the Prompt message, then presses PROC and then Enter to enable the A/P outputs and finally presses Approach on the autopilot. This sequence asserts the signals that emulates the ILS, causes the AP to go to roll mode, and then APR is engaged by the pilot to capture the LPV lateral navigation and GP signals. It is not a big deal if you are trained, you know where the MSG will come on, you ignore the message and just press PROC, Enter, and then on the AP you press APR.
So long winded explanation, this has nothing to do with roll steering or lack thereof.
Thank you for the great explanation NCyankee.
In a GNS installation, the correct output of “ILS/GPS Approach” is wired to the autopilot “ILS Energize” input so that either an actual ILS or an LPV can generate this signal.
OK, I get that. That seems straightforward.
The problem is that when this happens, if the pilot had already selected approach mode when GPS was still the Nav source
It seems that there are two cases:
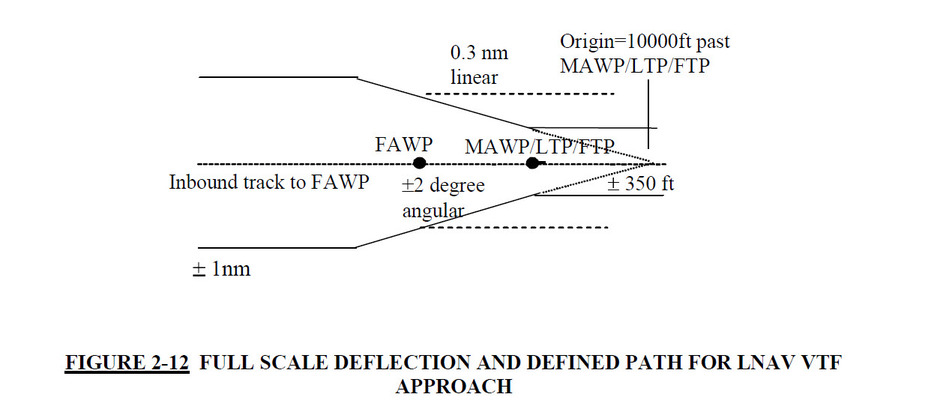
But… why press APR at all? When the navigator detects within 30nm of an airport it switches to 1nm FSD and at the FAF gradually to 0.3nm FSD. On the KFC225 I don’t use APR at all, for a GPS approach. The whole thing is flown in NAV mode.
I think that
the switch to VLOC to emulate an ILS causes the autopilot to disengage the approach mode and revert to roll mode.
this happens because the navigator briefly invalidates the flag(s) for the LOC and/or the GS, which causes the AP to drop out.
I wonder if this would still happen if the KFC225 was driven via the Sandel SN3500…
“But… why press APR at all? When the navigator detects within 30nm of an airport it switches to 1nm FSD and at the FAF gradually to 0.3nm FSD. On the KFC225 I don’t use APR at all, for a GPS approach. The whole thing is flown in NAV mode.”
That’s fine when you’re only flying the lateral part of an approach coupled to the autopilot – it can do this using roll steering. However, the autopilot can only fly the vertical part of approach when in APR mode using analogue deviation, hence why you need to make the Approach selection. In this situation, the roll steering function is also disconnected and the lateral mode also goes to analogue deviation + course error.
OK, I get it, thanks. There is no “glideslope” tracking function in the KFC225 unless APR is selected.
BTW I would not have roll steering (ARINC429) going to the KFC225. It would be fed purely from the analog “FCS” outputs of the SN3500.
So it will be interesting to see how this works.
I still don’t quite get why one cannot wire it up so that both LPV and ILS look like ILS. Forget legalities for now. I just don’t understand why this can’t be done. I mean, for example, VOR tracking is done in NAV mode also. What prevents GPS lateral nav, and LPV, looking to the autopilot like VOR tracking and then ILS? I don’t see any difference, except perhaps in the magnitude of the lateral deviations (i.e. lateral tracking accuracy), but even those are controlled externally to the autopilot. And AFAICT none of the old King autopilots have a “GPS” mode as such. Lateral is just lateral… it is what NAV mode does.
I don’t see why an autopilot needs to know whether the nav source is GPS or VHF/UHF. ARINC429 roll steering excepted; that is implicitly from GPS, but apparently not always; there are systems which send H and V ILS deviations over ARINC429, I am told….
Peter wrote:
this happens because the navigator briefly invalidates the flag(s) for the LOC and/or the GS, which causes the AP to drop out.
It happens because of the Nav source change. GPS to VLOC or VLOC to GPS. It triggers off of the annunciator output signal. The AP does not care the direction of the change. The issue is the source change. If the source change occurs after being in APR mode, the AP will kick out to roll mode and needs to be re-engaged in APR mode.The prompt mode function is to control the assertion of the autopilot outputs so that they are asserted first and then the pilot is to engage APR. That way there isn’t a source mode change after APR is selected.Peter wrote:
But… why press APR at all? When the navigator detects within 30nm of an airport it switches to 1nm FSD and at the FAF gradually to 0.3nm FSD. On the KFC225 I don’t use APR at all, for a GPS approach. The whole thing is flown in NAV mode.
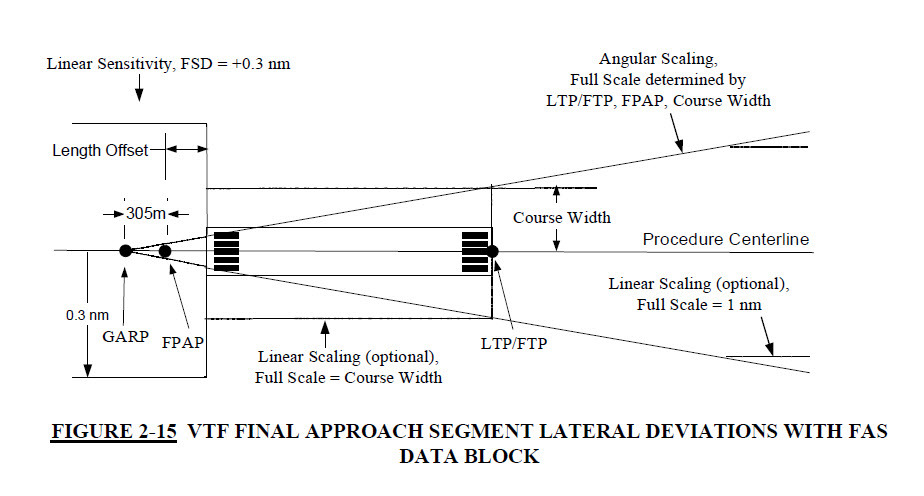
With a WAAS Navigator, there are 4 cases for FSD. LNAV or LNAV/VNAV without VTF; LNAV or LNAV/VNAV with VTF; LPV or LP without VTF, and LPV or LP with VTF. FSD is angular at +/- 2 degrees for most of the final course.


I’m sorry to bring this old thread up again but I’m now in the same situation.. old KAP140 in combination with a G1000 where both GIA’s were upgraded to WAAS and everything is working great except intercepting a LPV “Glideslope”.. The KAP just doesn’t care at all but the G1000 gives perfect guidance.
ILS captures Vertical and Horizontal guidance without problems (like before).
Avionics shop says in the SB it’s said no vertical guidance possible after the upgrade and that’s it.
Has this something to do with that ominous ILS Energize Wire mentioned earlier?
Thanks for any help




