
I am with @Martin on this one.
Its quite simple actually, we want to rotate something at a given Torque \tau and angular speed \omega
where \omega=2\pi rpm/60
Therefore the mechanical power Pout = \tau * \omega
The only input power we have is the electrical input power with a current I and voltage U which is given as
Pin = I * U
So given two different mechanical configurations with equal efficiency of the electric motor used, neglecting friction and other small losses, \eta the relation will always be
Pin * \eta = Pout
as follows from conservation of energy.
At constant voltage the current has therefore got to be the same for an equal torque and rpm or higher in @Peter s case of higher rpm and equal torque.
Returning somewhat back to the topic:
My impression was that switch mode psus are quite linear in their efficiency over a wide range of load currents unlike linear psus? And a load ratio of 0.1 would be quite acceptable or are there any caveats?
There seems to be the assumption that the cranking speed is the same, which is not true!
The figures I gave from the overhaul manual is test data for these particulair starters. The test bench is set such that it will load the starter with that torque. Apply electrical power and you should have the power consumption as indicated with the manual
Output RPM is only measured without load (which is not allowed on all starters, as some light weight starters overrev if you would do that.
So the advantage of a light weight is
- Higher RPM / more power
- Light weight
Disadvantage of a light weight is:
- High current consumption, this is especially an issue with Relays as Peter indicated AND on aircraft with the battery in the rear. Sometimes these starters come in for testing, only to find out that they are ok. The voltage drop makes them unsuitable for some.
- Gears fail
- Bendix quality less than that of old design heavy weight bendix style.
The key factor is that the original “Skytec lightweight starter” drew about 300A. The one I have is the 149NL

which draws a lot less.
The traditional Lyco starter which is used on most of the GA fleet

draws something like 50A, but the [non]effectiveness is readily visible at your local airfield on any cold morning, or from the GB of forum bandwidth used up discussing hot start procedures  I would never go back to it.
I would never go back to it.
The other side of it is that many of the old model are still working after 30 years. Skytec had some QA issues on theirs e.g. the long screws

were not done up tight and the motor twisted itself around, ripping off the internal wiring.
Jesse wrote:
There seems to be the assumption that the cranking speed is the same, which is not true!
No, there are just two discussions going on and it seems some have problems distinguishing them. One is about the effect of gearing itself, that’s what I was talking about (I don’t know enough about starters, but I do remember enough of elementary physics). And another is about particular starters where difference in cracking speed obviously matters, you participate in that one. There is potentially a third one, but I’ll leave that one to vic.
As another angle here:
The optimal power transfer, from a voltage source with a finite output resistance, takes place when the load voltage is 50% of the open-circuit source voltage.
So with a 12V battery, you want to see 6V across the starter motor terminals.
If you see less than 6, you need to get a starter which draws less current and/or you need to thicken the cable(s). If you see more than 6, the starter is not loaded enough and while this is not a bad thing in itself, it isn’t optimal.
@vic: You are assuming that all electrical motors are built the same – they obviously are not – and that the engineers specing the starter are idiots and just choose one at random – this is also not the case (hopefully ;) ).
Using the same motor specd for reduction gear usage without the gears is obviosuly no good as you couldn’t operate at peak power. The same is true the other way around.
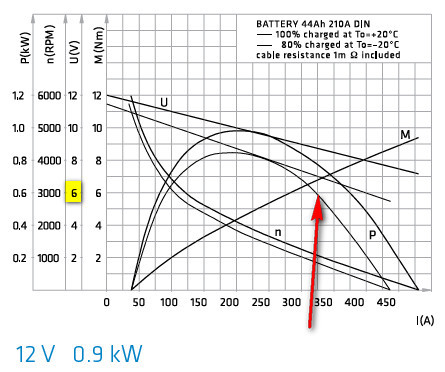
Comparing the data sheets and power curves of some actual starter motors, both direct drive models (AZE series) and reduction gear (AZD series) ones you will notice that the efficiency at peak power for comparable power rating is highly comparable (about 50%, peak power is also not peak efficiency), hint calculate Pout/(I*U) on the diagrams.
http://www.letrika.mahle.com/media/att/12/12/05/starter_letrika_web.pdf
And with them being rated for the same voltage the current at peak power is also pretty much the same (about 300A) at about 1.1kW.
But this was also my final attempt to make that a bit more clear. ;)
@Peter: While that is true for the max loss in an Ohm’s resistor sense I think its a bit to much of an oversimplification for an actual motor as can also be seen from the power curves of the actual motors I just posted. ;) The reason for that being AFAIK/AFAICT that the voltage doesn’t actually drop to 0 at stall torque, quite far from it in many cases.
If the voltage at the motor terminals dropped to zero, there would not be any current going into it, so the motor would never spin up again, even after the universe cools to absolute zero 
But maybe I misunderstand you
The RPM drops to zero at the max current – the stalled condition – and the terminal voltage is 1/2 the no-load one (e.g. 6V) not far before that point e.g. this one is drawing 350A at the “best power transfer” point.
But for sure it will be more complicated because once the engine is spinning it needs less torque than it took to get it moving.
I have a feeling that in GA this whole business is done backwards i.e. they picked a starter which would work in typical airframes (battery in the back, the slightly crappy Stancor relays with ~100A contacts) and geared it so that it spun the engine adequately. But it is only just adequate – take my typical winter airfield example. A lot of people nearly flatten their battery trying to start with these weak starters.

