
Low inertia aircraft are inherently less stable than high inertia aircraft. Having a larger proportion of wing surface, and faster engine power response agravates this.
There have been recent NTSB fatals where it appears a go-around was attempted.
Are skills where large control movements are needed lost, perhaps due to less handflying and more autopilot use?
Opening the throttle at low speed may need a lot of control.
I was in a Jodel DR1050 when, after a perfect cross-wind landing, the low-hours pilot suddenly opened the throttle. The into-wind wing lifted and the aircraft turned into wind, departing the runway. (I took control and managed to stop with no damage.)
Antonio wrote:
This does not mean we should mimic procedures, but still there is a lot in the airline culture that we could import into GA, putting to bed attitudes like “I will never make that mistake”
IMHO a better approach is ‘I will make that mistake, so I’ll do everything I can to trap the error before it becomes a hazard’
Yes that is a better approach: in-line with how to know I am not making a mistake? how to know if you are likely to be dead in the next 1min?
Most errors can be corrected in timely manner if caught by the various safety nets or margins, anyone who think they will never make an error one day should get another hobby…
@Ibra, of course you can have a stable power off approach in VFR. If you have the right view of the runway and your speed is good and you can make the runway or the point on the runway you are aiming for without suddenly slamming on the power at the last moment, but also that your gear is down if you are retractable and that your flaps, if you have them are where you want them to be.
And yes there have been accidents due to the decision to go round but they are usually the result of the decision to go round being taken too late or badly performed.
I guess it make sense if one views it as “gate”, a first interpretation where you decide to continue or to go-around (just like IFR DH) rather than chasing approach parameters all the way to the ground, what does not make sense is the second interpretation that “stable approach” means one can only make small adjustments wile on whole long 10km final or require power to make it, which basically says how you should fly it and ignores all other pieces that hang around
The end result of 2nd interpretation is someone who can’t fit themselves with other busy traffic neither when mixing with slow VFR on visual circuit or mixing with fast IFR on ILS, they end up behind without proper fallback on 1st interpretation which is what saves the show in daylight VMC
Of course 3rd interpretation confuses “VFR stable approach” with 1/2 scale deflections on LLZ/GS while on IFR? that surely has to do with protected terrain area in IMC, max range of ILS/LPV signals and the lags form jets weight/engine inertia 
Out of curiosity, on an A32x or 737, what is the altitude on a stable approach at which you would have to initiate a go-around in order to avoid touching wheels to the runway or getting uncomfortably slow? What about an early generation 737?
I’m guessing that airline go-around decision heights were probably originally defined as a multiple of this altitude?
kwlf wrote:
Out of curiosity, on an A32x or 737, what is the altitude on a stable approach at which you would have to initiate a go-around in order to avoid touching wheels to the runway or getting uncomfortably slow? What about an early generation 737?
I seem to remember being told by a 747 captain, that with certain very low vis approaches, the decision to go around is made and power applied, but the aeroplane may actually touch the ground briefly before climbing away?
Edit: thats not about being stable though…
For us our stable approach gates are 500ft in vmc, 1000 in imc and for circling on speed and profile by 500, lateral by 300ft.
The last point where we can decide to go around is the selection of thrust reversers. But rhats for other reasons of when becoming unstable after the gate
Thread drift alert 
ILS approaches in a nutshell
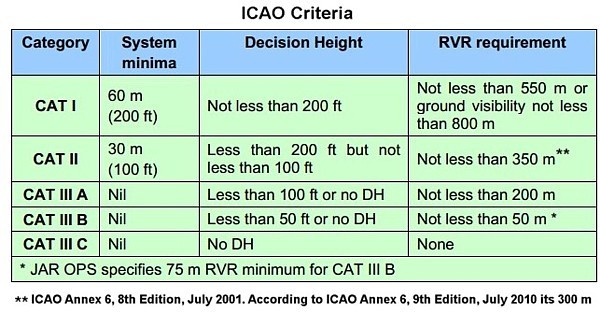
As most of you IR rated know (or should know), there are different ILS categories. In GA, most, if not all single and multi aircraft (lest you own a business jet, and even then…) are "restricted to CAT I, meaning a 200ft DH and 550m RVR requirement.
In the airlines we have CAT I, II, and III. Cat I being the standard, day to day used approach. Yes, it is slowly being replaced by RNAV, but that is not the point here.
Should the visibility drop <1000m (or some other value close to that, as published by the airport authority), RVRs are used, and Lovis procedures implemented. The requirement to fly a Lovis approach, e.g. Cat II, or III is threefold: the airport must be certified and switch to Lovis (standby generators, sterile touchdown, etc), the aircraft must be certified (dual AHRS or similar, dual A/Ps, dual etc), and the crew must be certified (trained and current).
As can be seen on this generic table, Cat IIIC can be conducted to No DH and 0 RVR minima. Even on a Cat IIIA or B, using a DH of 50ft, one might touch the runway if a go around is done at the minima. Depending on the weight of the aircraft, AP program, and the reaction of the crew.
End of thread drift
Regarding the stable approach criteria. Again, in the airline world, each is “free” to choose it’s own set of rules. The stable approach concept was introduced many moons ago, largely to prevent runway excursions after landing. As pointed by some above, a system of gate, or multiple gates are used. The use of the 500ft gate could be of benefit for GA. The stable criterias are “established on the nav profile” lat & vert, “speed” -0/+10 (for an airliner, reduce to -0/+5 for a SEP?), “bank angle” <10°, “sink rate” <1000fpm, “configuration” for landing.
Can the stable approach concept be adapted and benefit GA? It certainly can, the more so if on an instrument approach. It might be more difficult to implement on a tight visual circuit, though respecting a “on speed” check on finals can only be beneficial. As an example, Mooney’s are known to be intolerant of any overspeed and will then float. And float.
To have a say 500’ or lower gate, and assess one’s approach quality can only be beneficial.
Can the stable approach concept be adapted and benefit GA? It certainly can, the more so if on an instrument approach. It might be more difficult to implement on a tight visual circuit, though respecting a “on speed” check on finals can only be beneficial
Yes I agree the concepts makes lot of sense on ILS/LPV in ATC airports (maybe except huge busy CAT airports where in SEP you need to shut up, take vectors, keep VNE and flaps up until 2nm final in IMC, like everybody)
You can’t do lot of that in uncontrolled flights with no ATC? the circuit could be busy and you will be looking outside rather than tracking deviations on LLZ/GS needles, so you have to stick to simple a criteria “on speed & gear down”
You may have to be imaginative to conduct an approach in Mooney behind ULM on some uncontrolled busy training airport, the other way around is: don’t go there




